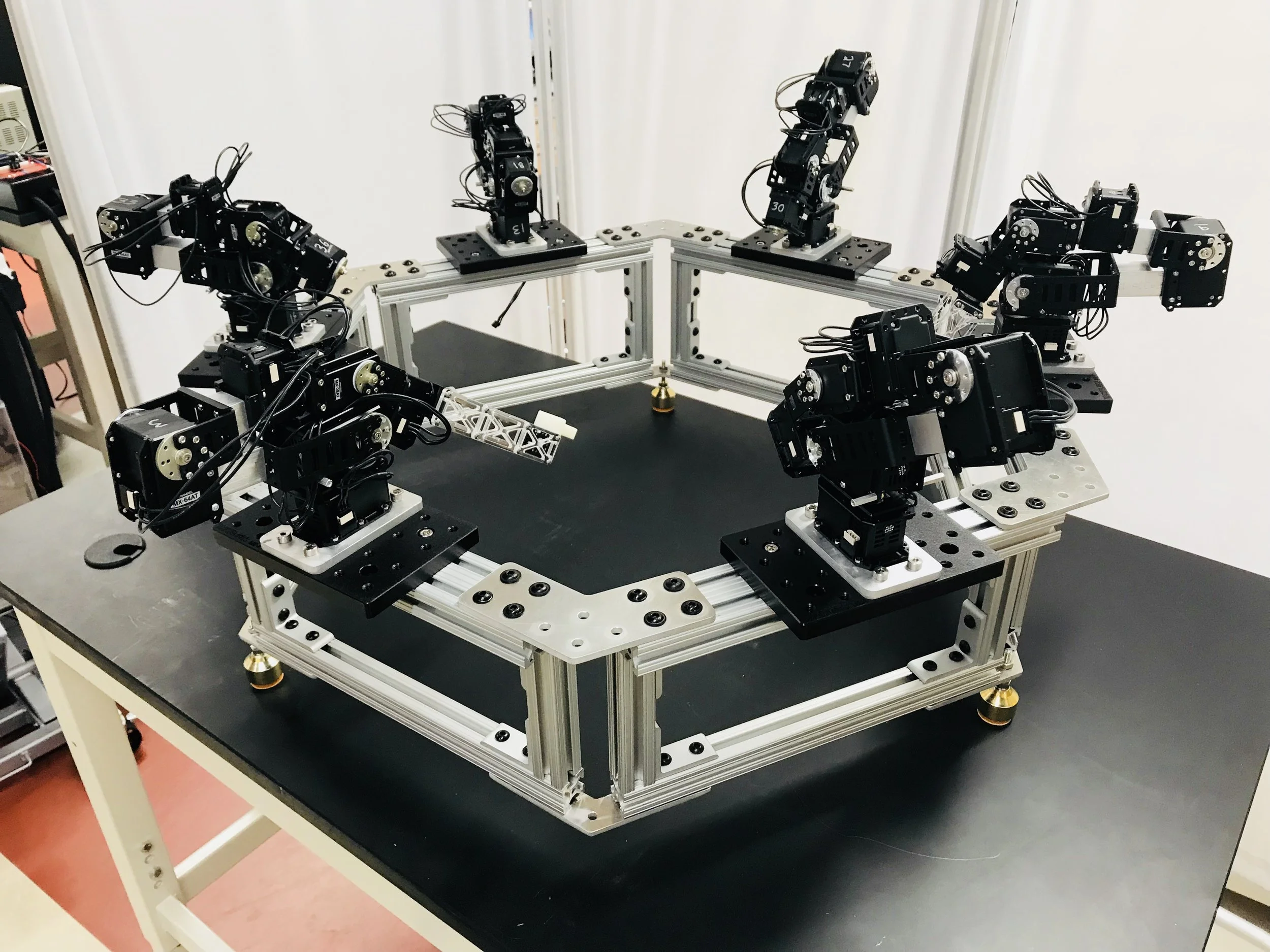
Doctoral Research
My doctoral research in Non-Contact Ultrasound with Dr. Brian Anthony encompasses work/knowledge in acoustics, mechanical design, robotics, optics, image reconstruction, and signal processing.
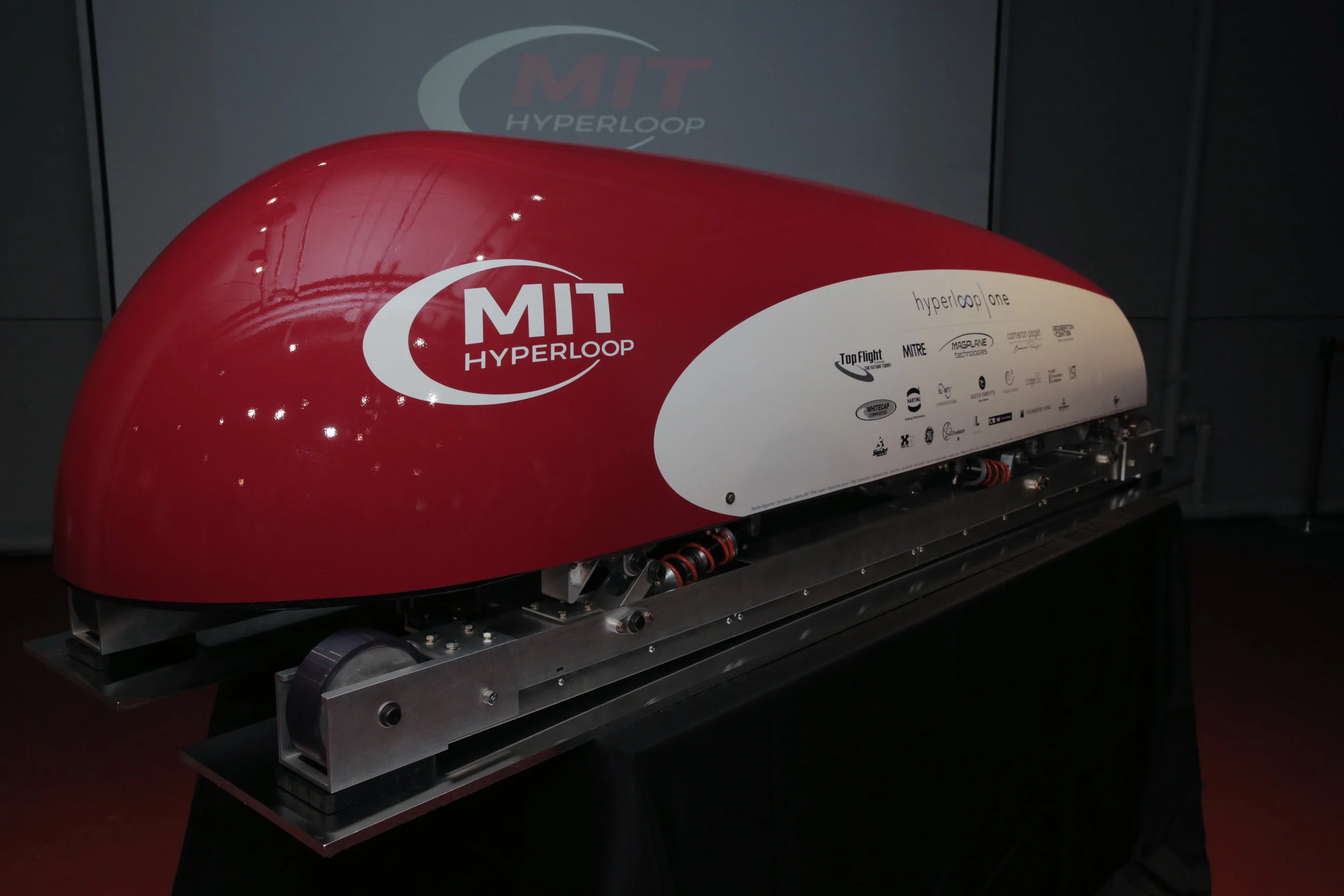
MIT Hyperloop
I participated in the inaugural SpaceX Hyperloop competition with the MIT Hyperlooop team. I was a member and lead in the Vehicle Dynamics Sub-Team responsible for braking, suspension, lateral control, and the low speed systems. We won 1st place in the initial Design Competition and were one of three teams to run our pod in the SpaceX Hyperloop tube, for which we won the Safety and Reliability Award.

MIT MakerWorkshop
Outside of research, I volunteer as a mentor at the MIT MakerWorkshop, a student led machine shop at MIT. I served as the electronics/measurement machine master and was elected the Vice-President for 2017/18.
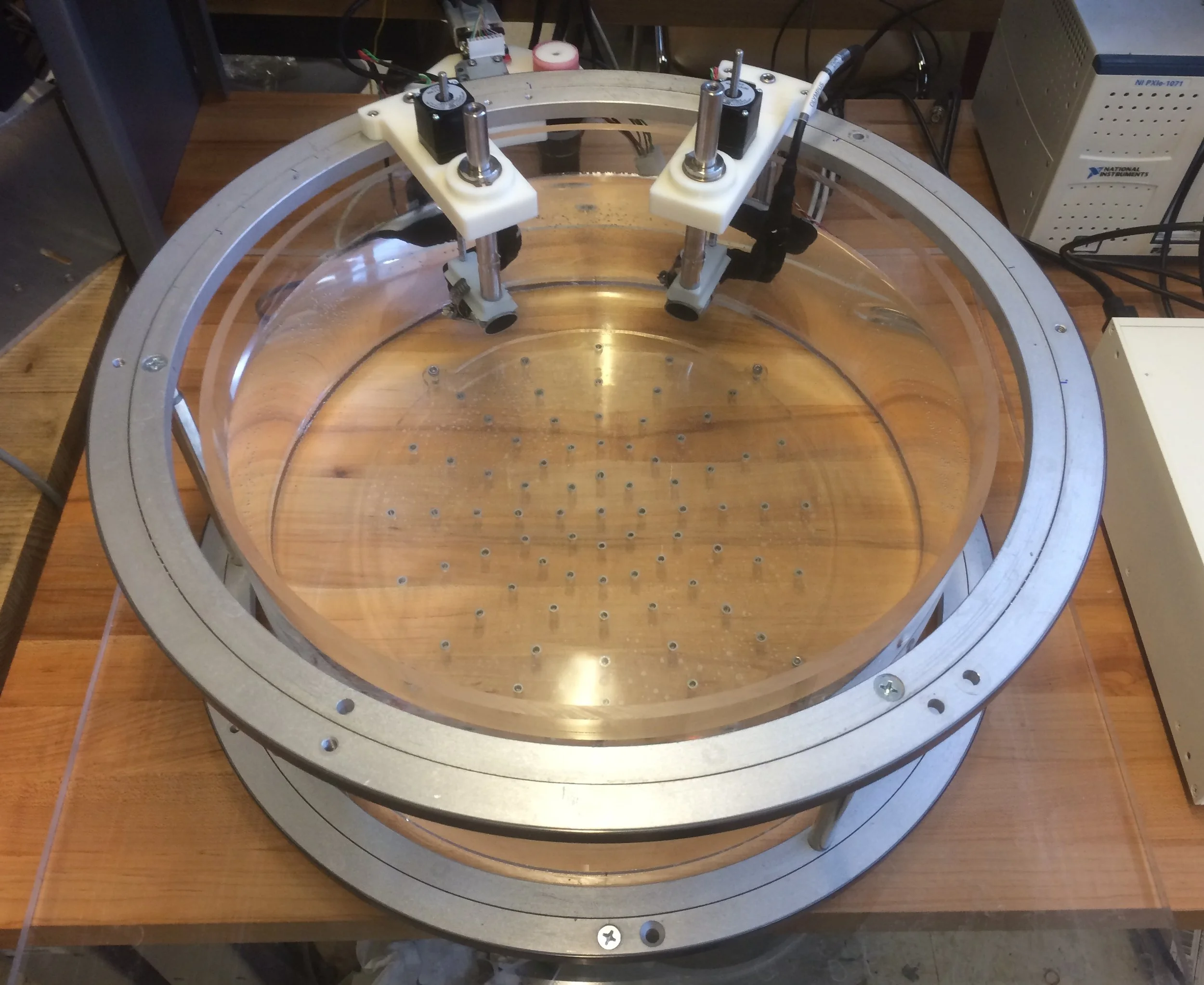
Master’s Research
My Master’s research also with Dr. Brian Anthony focused on design of a flexible single element ultrasound system for ultrasound tomography. The system allows cost-effective evaluation of ultrasound tomography algorithms prior to clinical implementation.
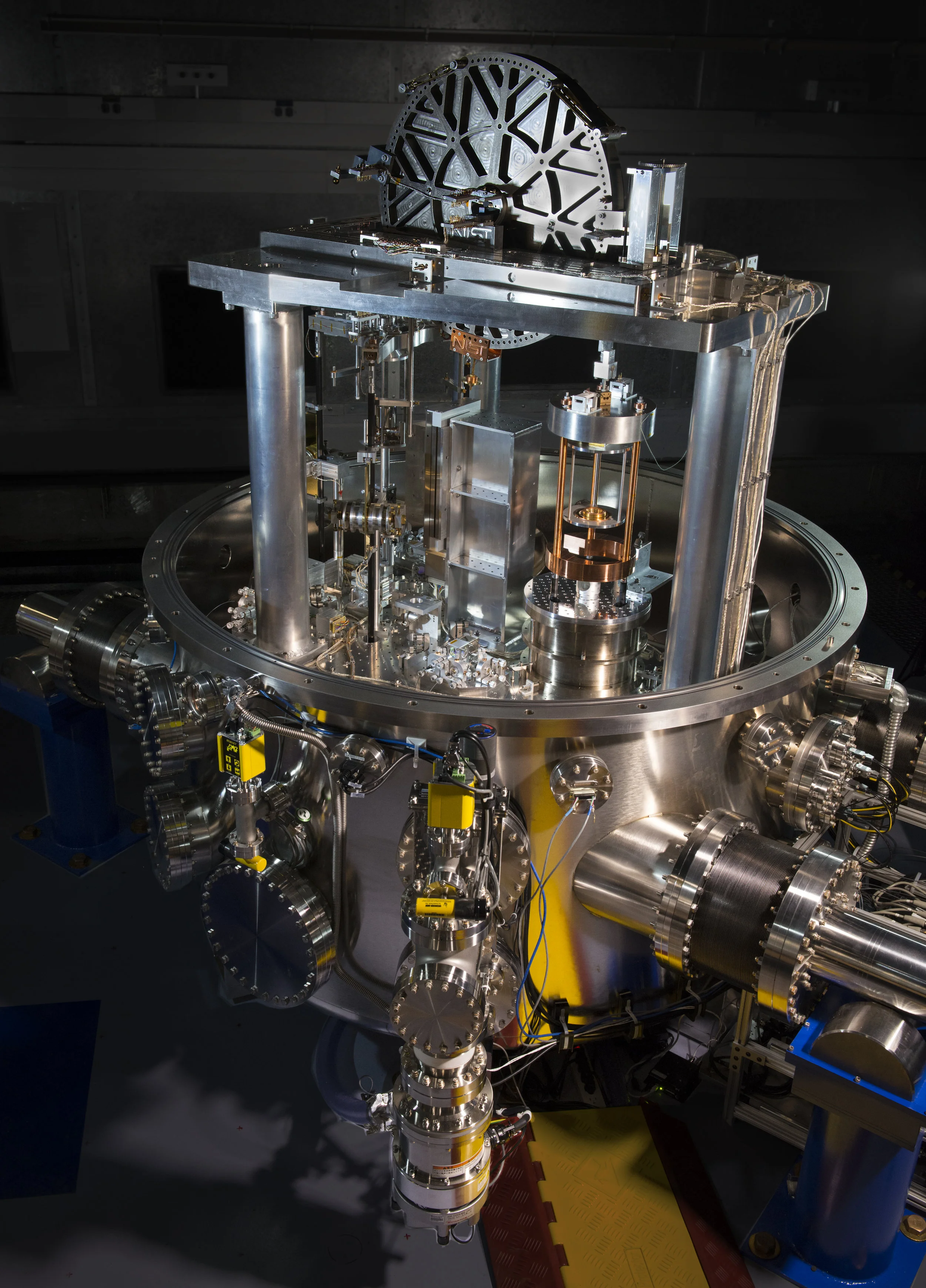
NIST Co-op
During my undergrad, I completed a co-op at the National Institute of Standards and Technology (NIST) in the Physical Measurements Group (PML). I worked on mechanical design and component manufacturing for the next generation NIST-4 Watt Balance to redefine the SI Kilogram. For education and dissemination, I also designed the LEGO Watt Balance for teaching the core scientific principles of the Watt Balance to the broader community.
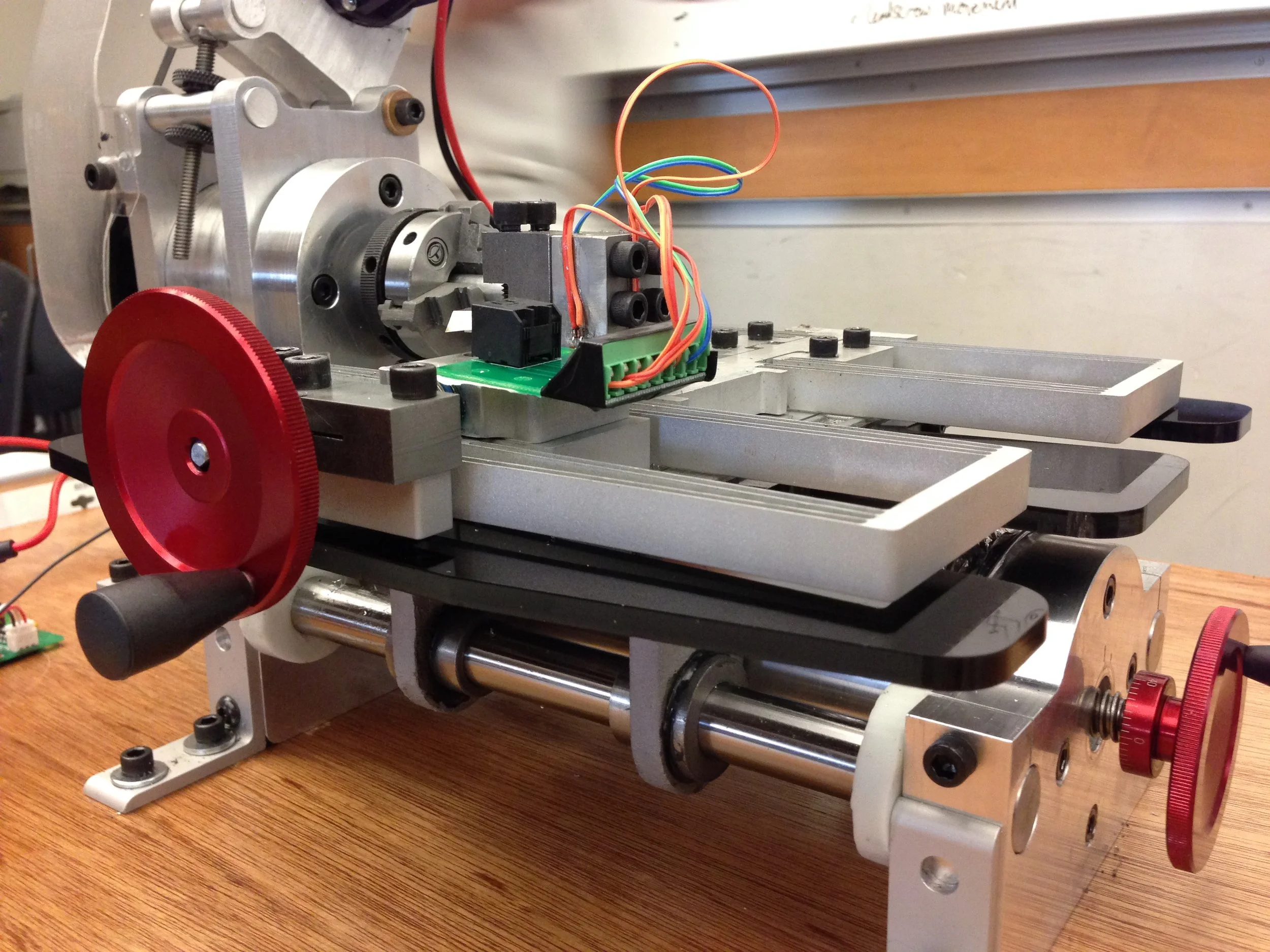
Course Projects
Various course projects are covered here including: design of a desktop lathe, design of a novel thoracotomy device, assistive lower-limb exoskeleton design, quantitative evaluation of arrow stiffness, and RC race car for manufacturing.
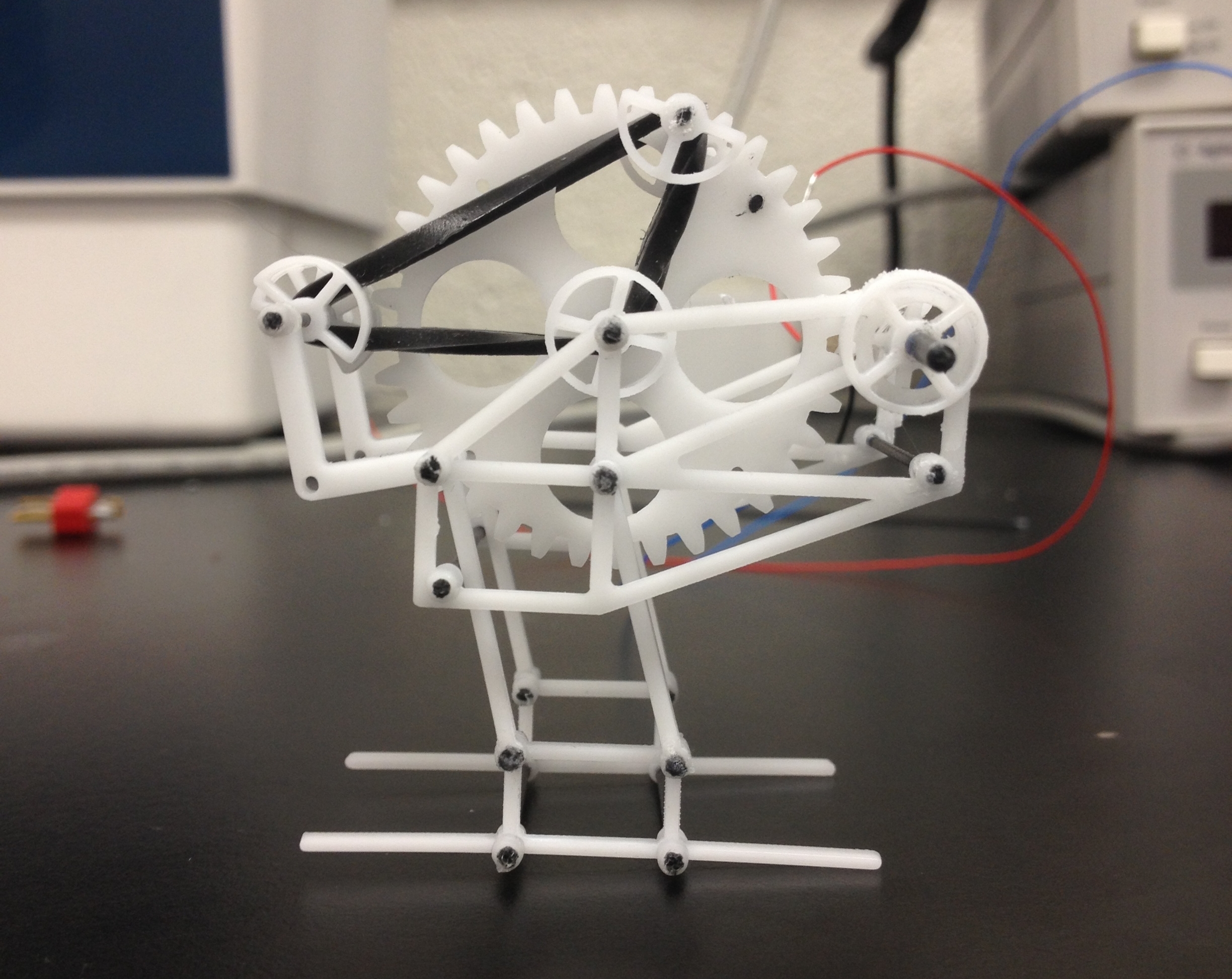
Undergrad Research
During my undergrad, I did research with Prof. Sarah Bergbreiter in the the University of Maryland Microrobotics Lab. My research focused on designing a micro robot that can efficiently utilize jumping as a form of locomotion.